Приветствую, Самоделкины!
Сегодня мы вместе с Романом, автором YouTube канала «Open Frime TV», соберем платформенный левитрон.

История создания данного устройства началась еще в далеком 2016 году. Тогда автор наткнулся на статью «МозгоЧинов», и всей душой загорелся повторить данное устройство.
Но не все так легко.

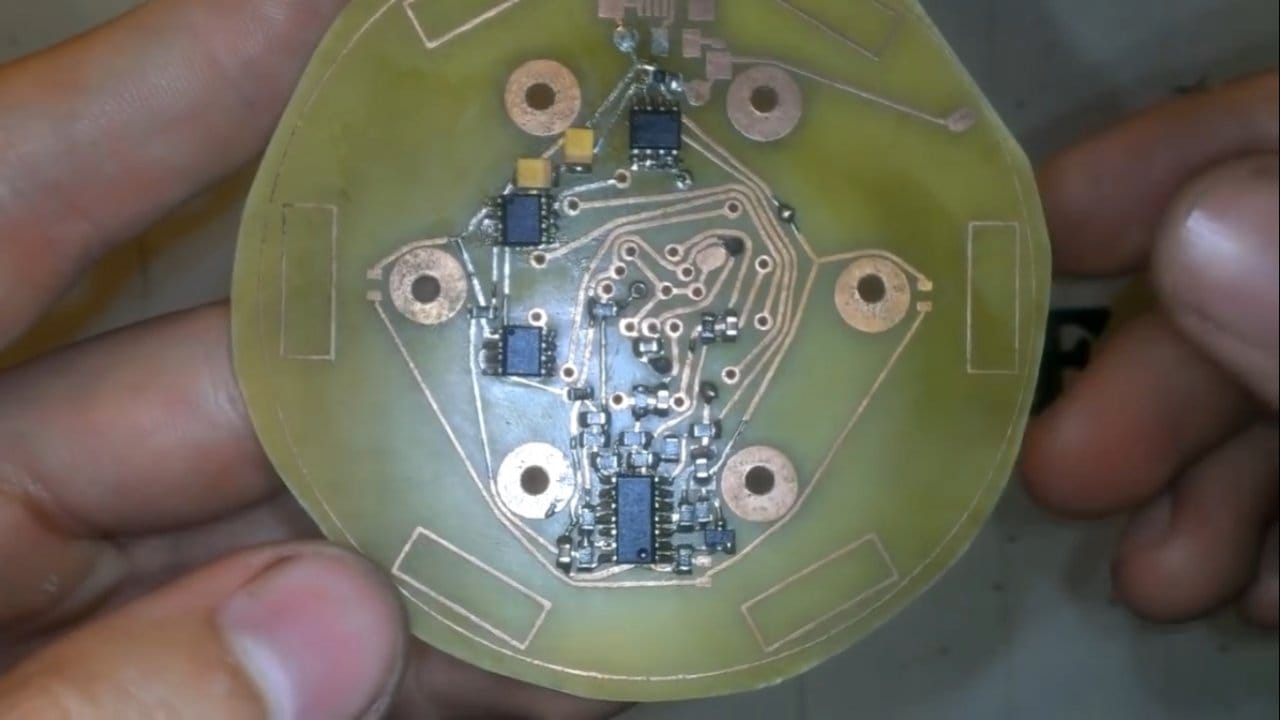
Скачал печатку, начал травить, а потом собирать устройство.

Но в конце концов все обломалось. Спустя полгода, может чуть больше, автор стал осваивать Ардуино. И ему в голову пришла идея сделать левитрон на ней. С новыми силами он бросился в бой, но опять разочарование. Много бессонных ночей в написании кода, и сборке прошли зря. Левитирующий магнит все никак не хотел зависать, его дергало из стороны в сторону и все тут.
Спустя еще какое-то время автор наткнулся на очередную статью с полным описанием, заказал комплектующие, начал собирать, намотал новые катушки, запустил все и снова неудача. Автор начал думать, почему же левитрон не запускается и понял в чем проблема. Оказалось, что все намотанные катушки имели внутри металлическое основание, и сила с которой магнит тянулся к сердечнику превышала противодействие. Из-за этого и происходила такая лажа. В итоге автор перемотал катушки и свершилось чудо - магнит полетел.

Радости не было предела. Автор любовался своей самоделкой целый вечер. Ну это была так, предыстория, ну а теперь приступаем непосредственно к сборке.

Итак, в основании у нас лежат постоянные магниты, которые создают магнитное поле в виде купола. На самой его вершине находится точка равновесия, в этой точке магниты основания как бы выталкивают левитирующий магнит вверх, компенсируя силу тяжести. Но есть одно «но», эта точка крайне нестабильна, и левитирующий магнит постоянно слетает с нее.

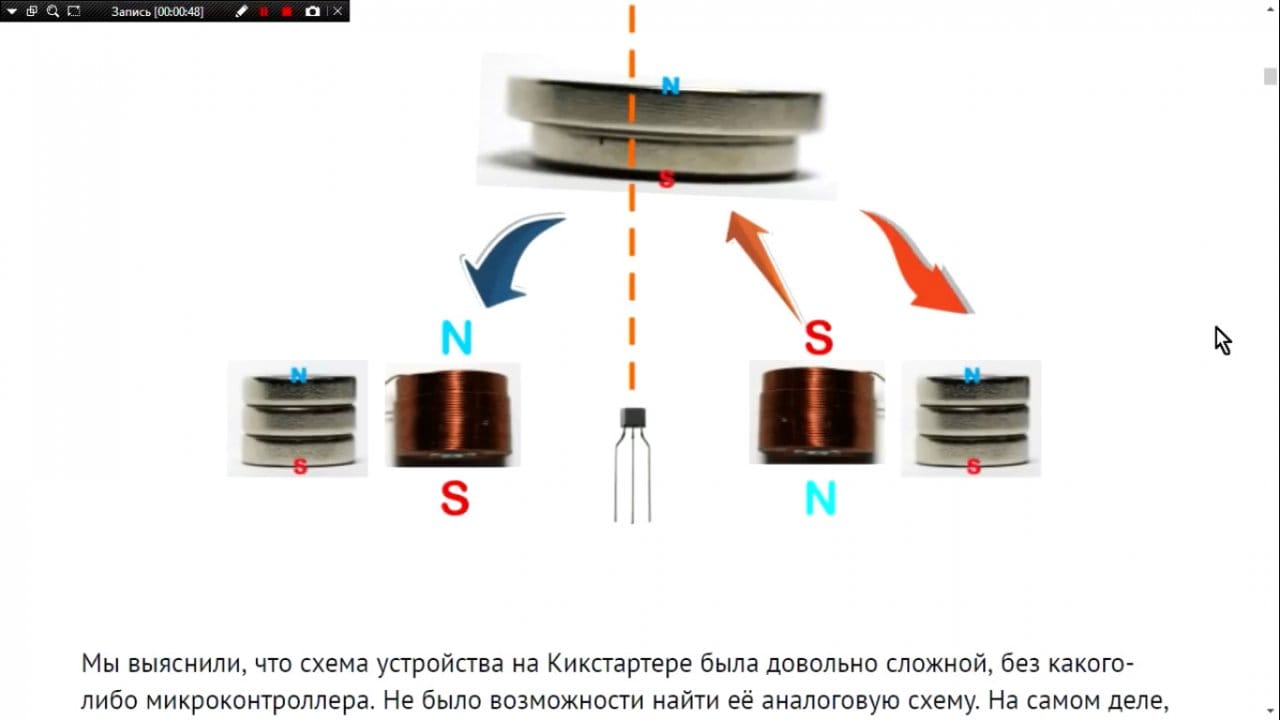
Тут нам на помощь приходят электромагниты и датчики Холла, которые отслеживают положение магнита и как только он начинает улетать с точки, включается соответствующий электромагнит и подтягивает левитирующий магнит обратно в центр. Таким образом он совершает колебания в разные стороны, но с большой частотой, и глаз этого практически не видит.
Отлично, разобрались с теорией, переходим к практике. Мозгом схемы будет Arduino Uno.
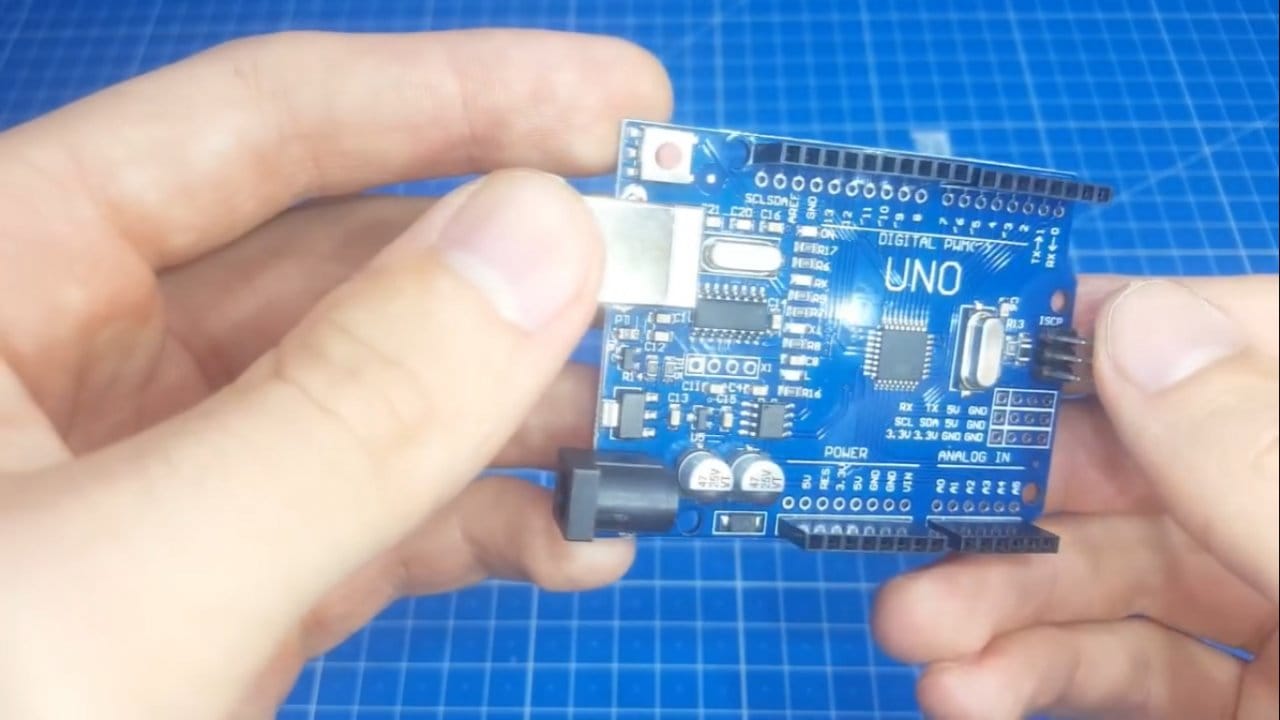
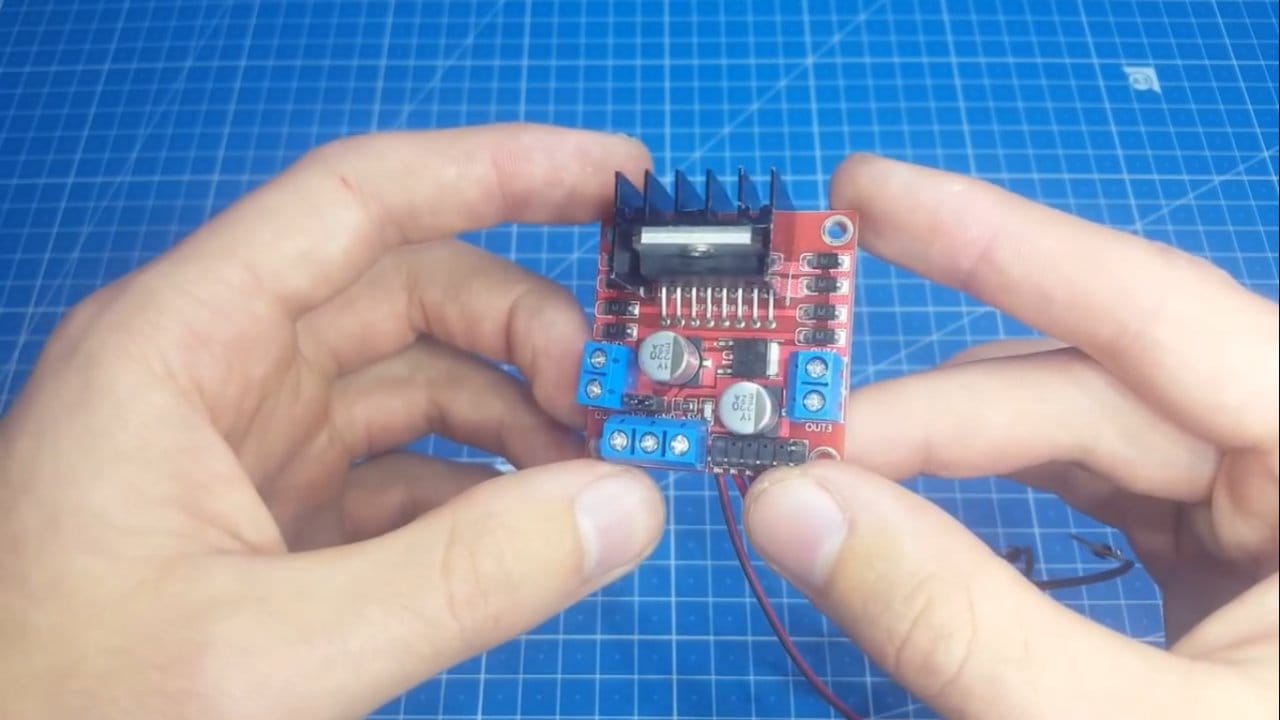
Сперва автор хотел использовать Arduino Nano, но нечаянно спалил ее, подав не то напряжение. Силовая часть схемы - это драйвер шагового двигателя L298N.
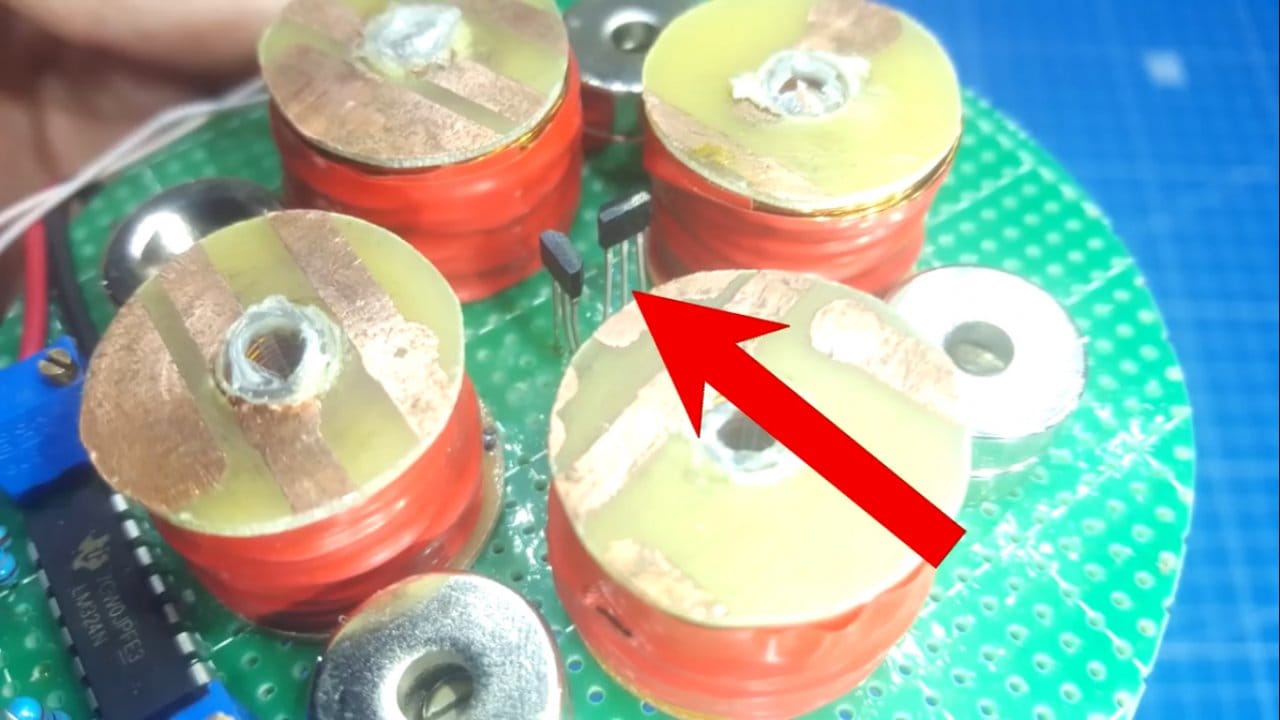
Ну и следящая часть - это 2 датчика Холла, расположенных в центре конструкции.
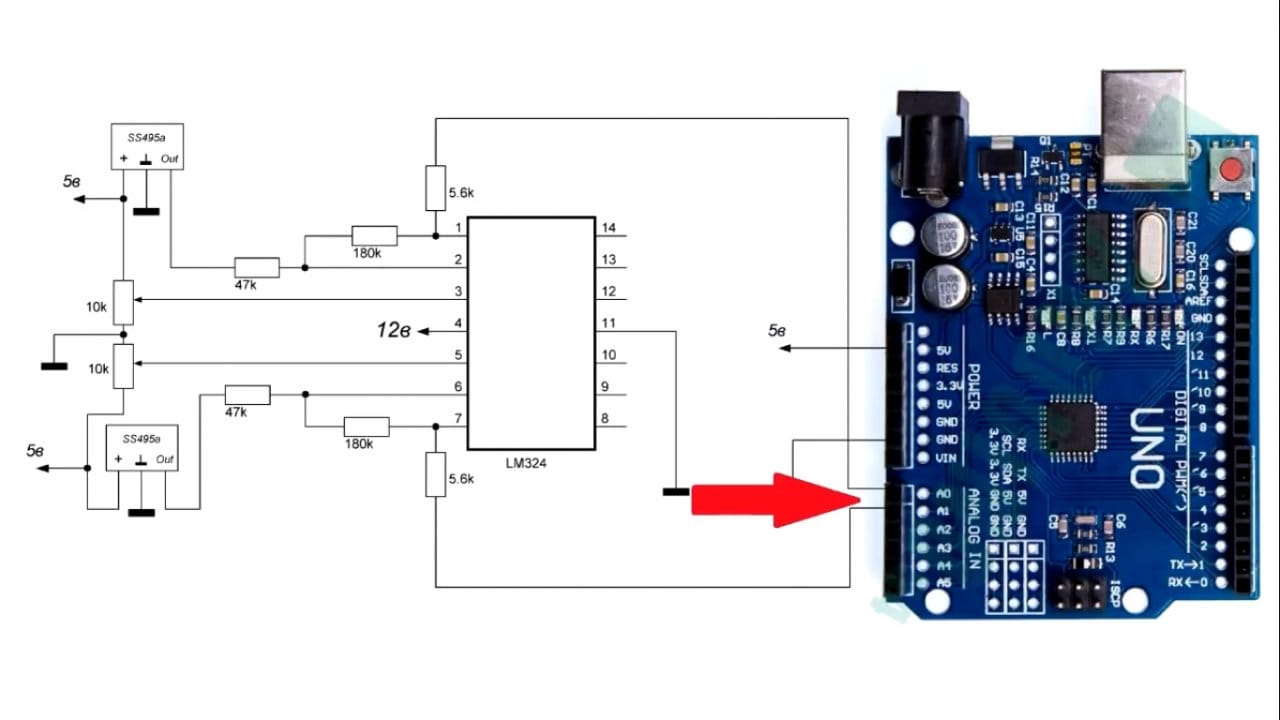
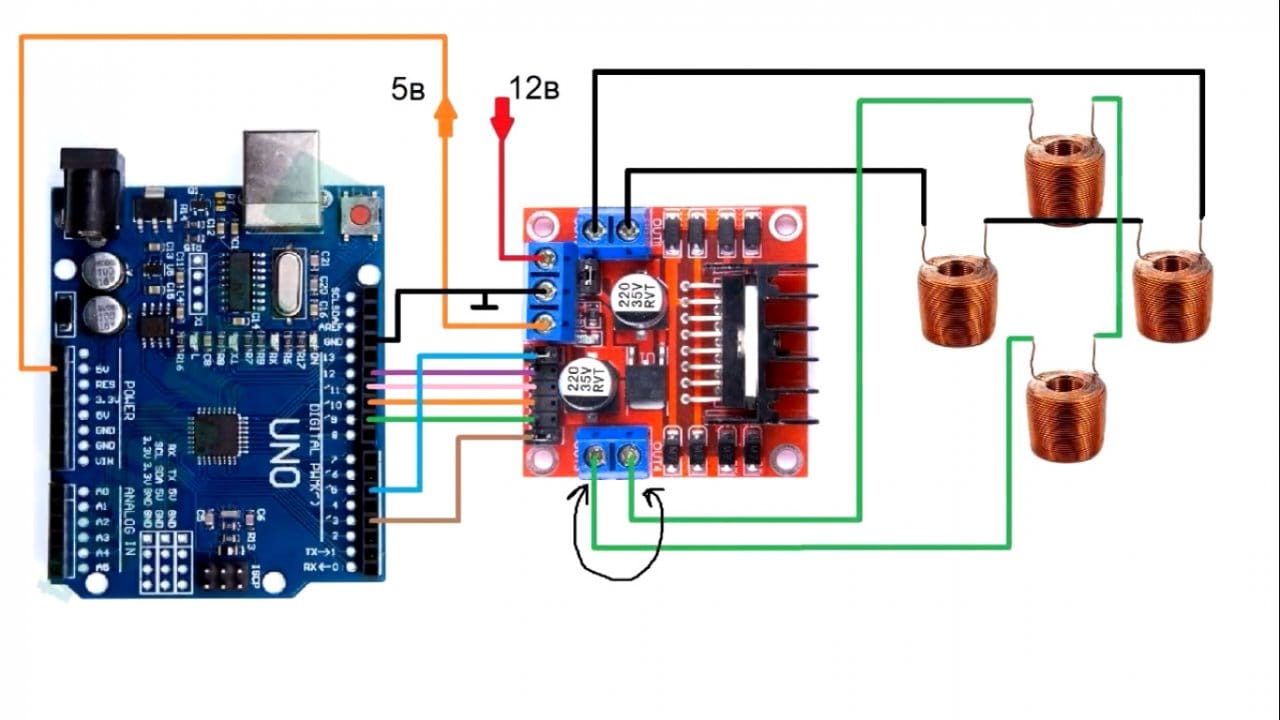
Теперь давайте рассмотрим схему устройства, начнем, пожалуй, с блок схемы.
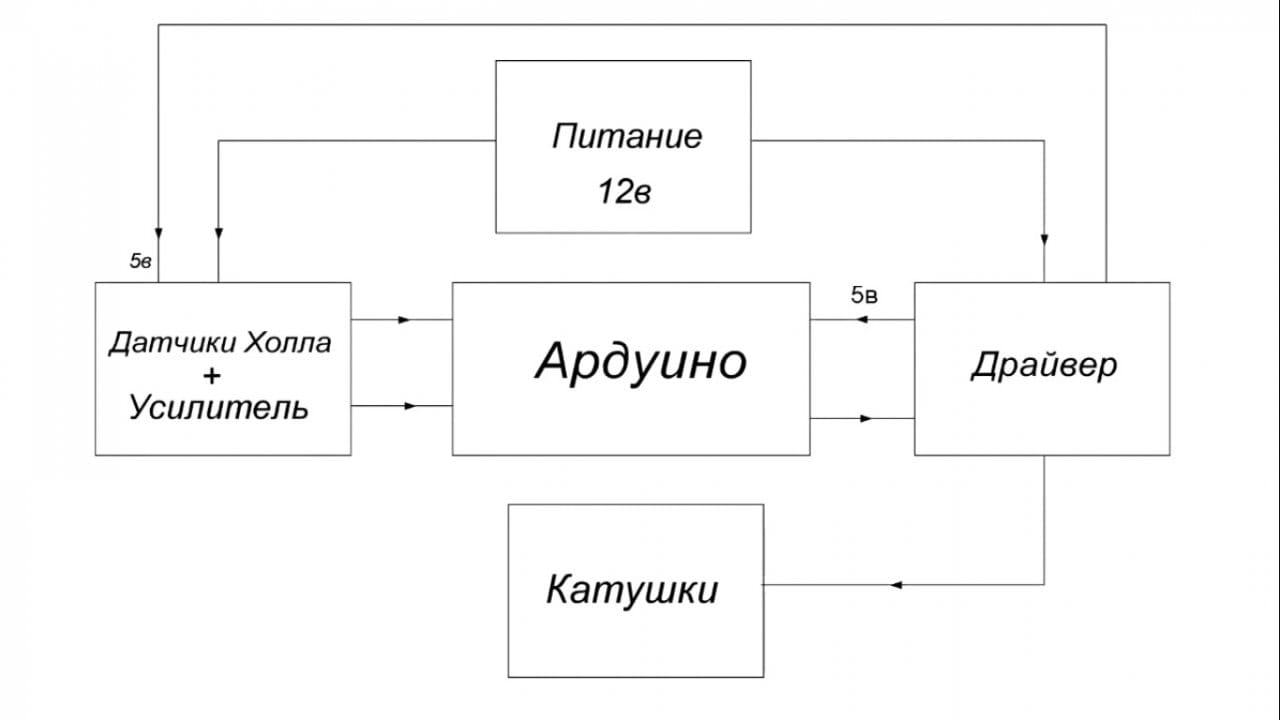
На схеме видно, что с чем соединено, теперь рассмотрим каждый блок по отдельности. Датчики Холла снабжены дополнительным усилителем на микросхеме LM324. Усиленный сигнал с Холлов поступает на аналоговый вход Ардуинки.
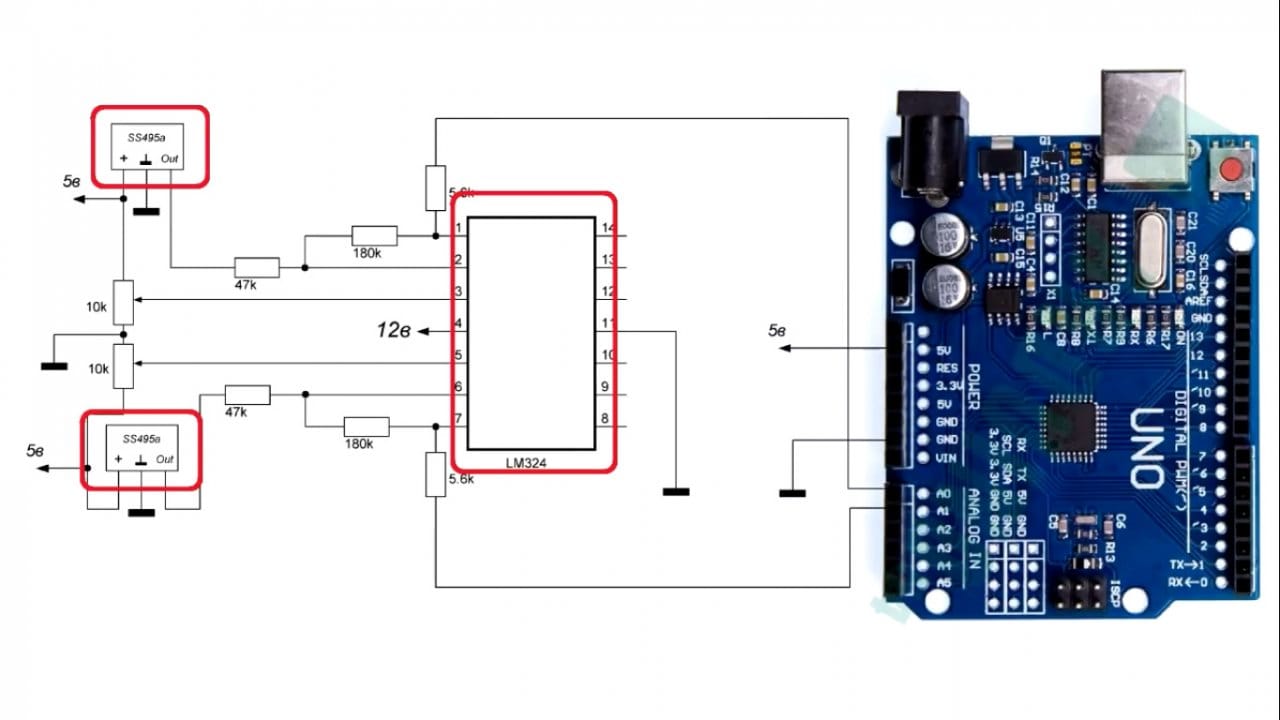
Следующий блок - это драйвер и катушечки. Про их намотку чуть позже, а сейчас чисто схема.
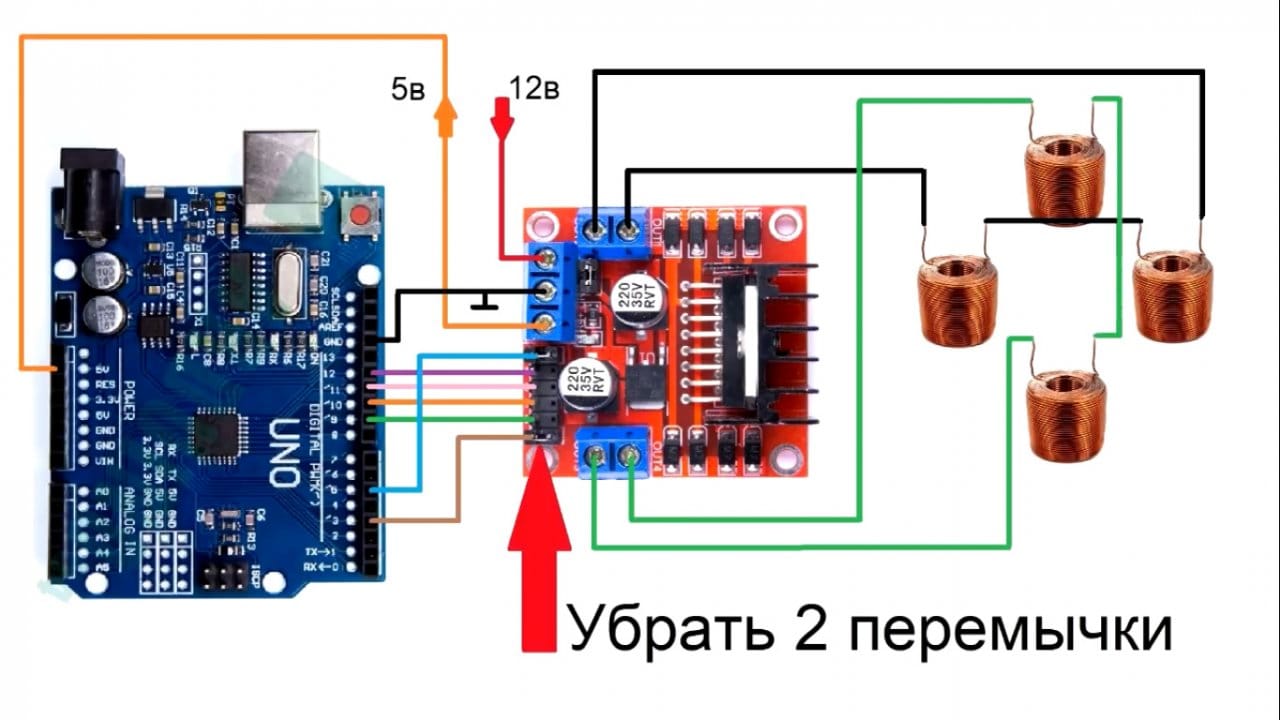
Как видим, подключается все элементарно и без особых проблем.
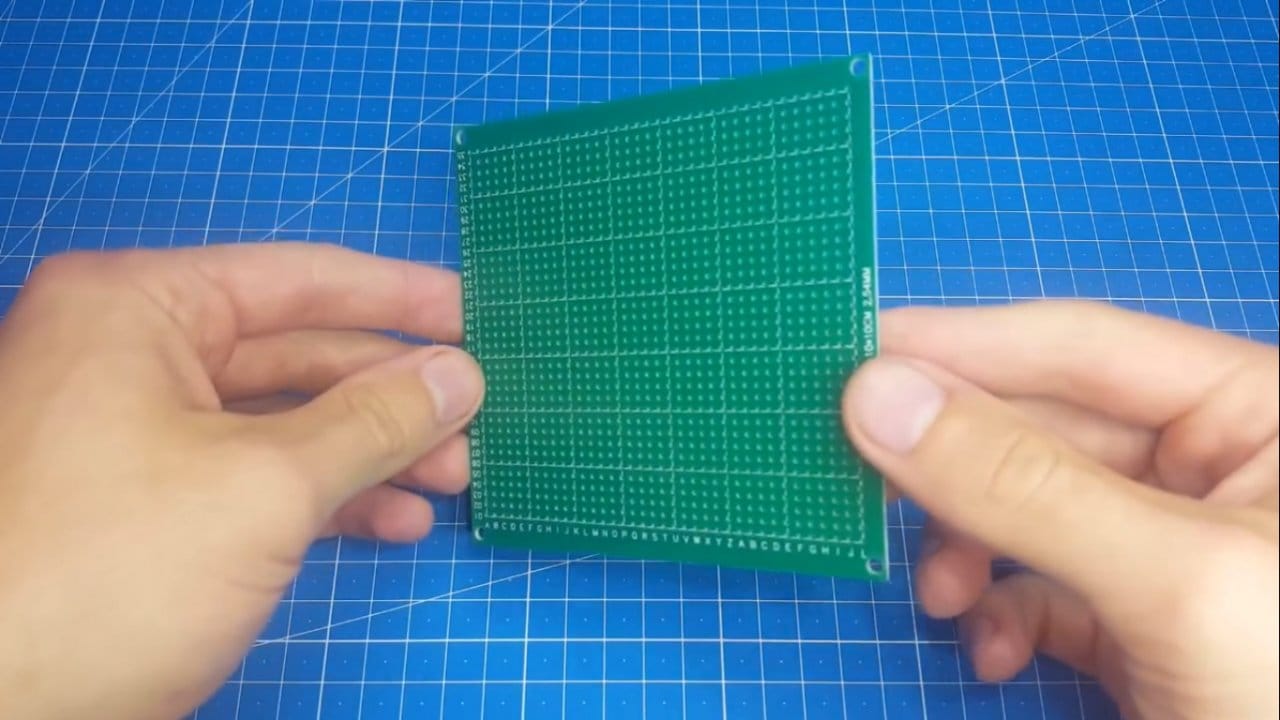
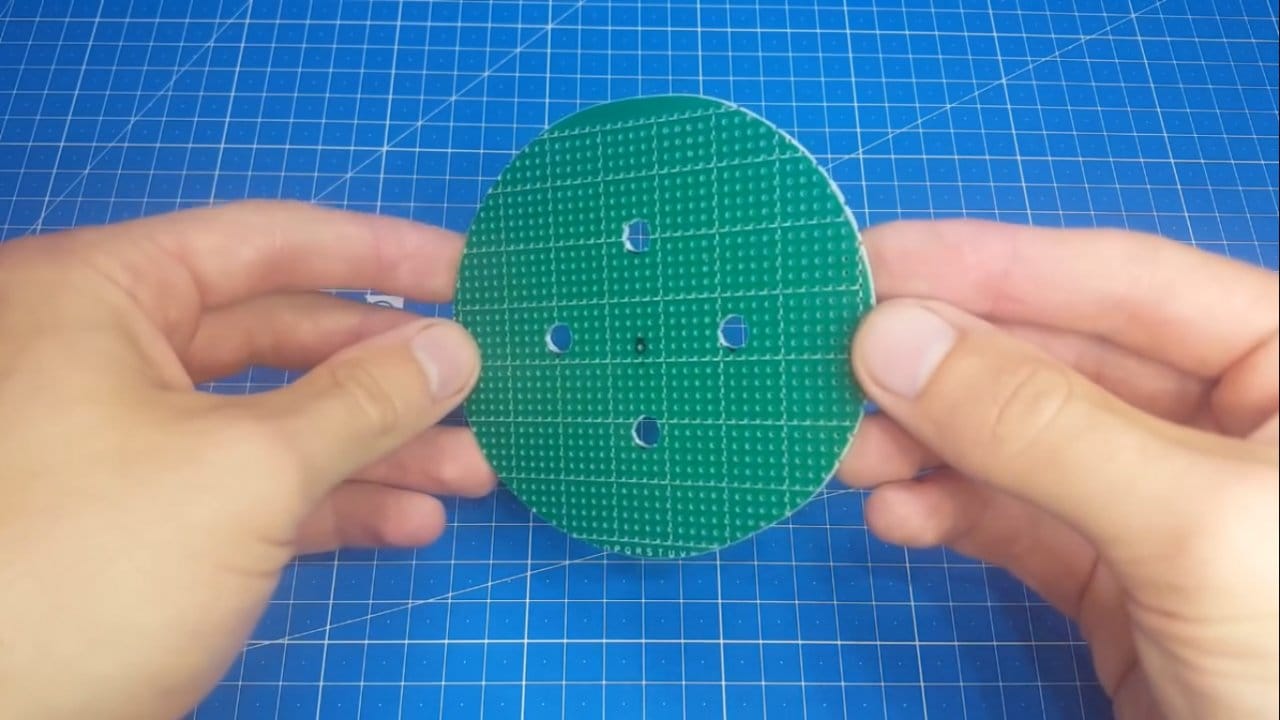
Теперь переходим к сборке. В качестве основания будем использовать макетную плату. Ее нужно немного уменьшить и просверлить отверстия. Расстояния между отверстиями 40мм.
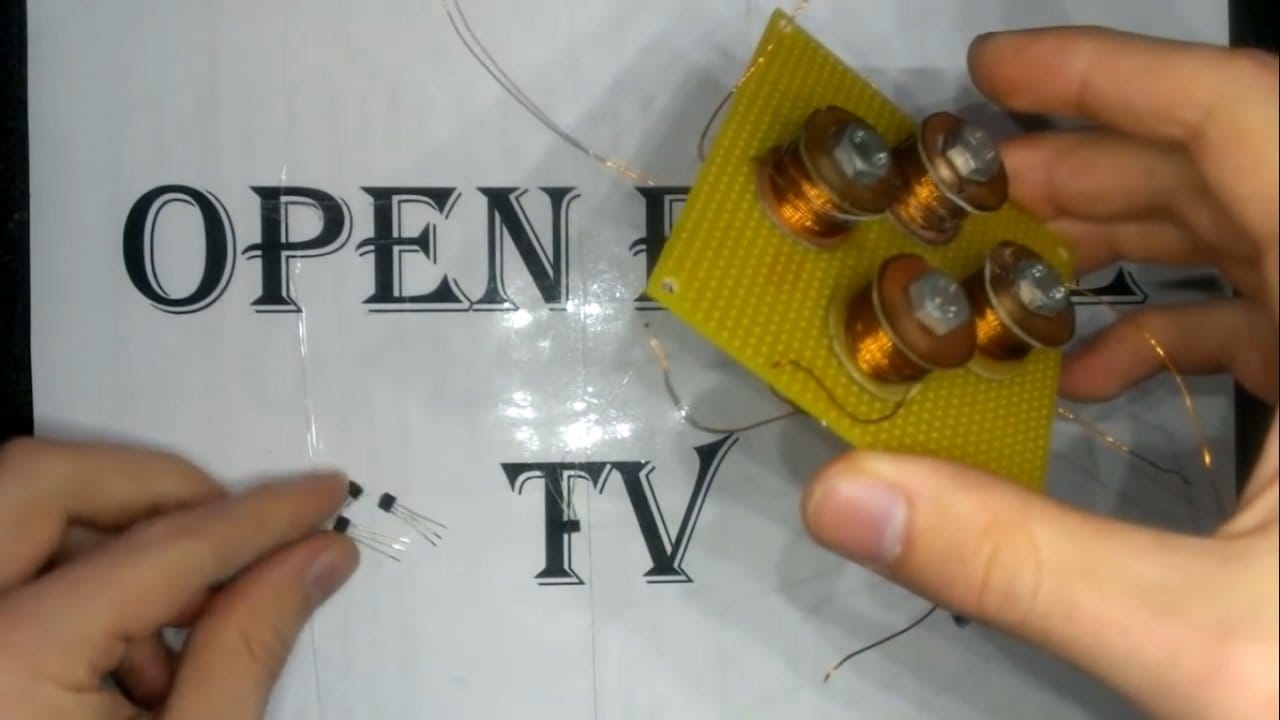
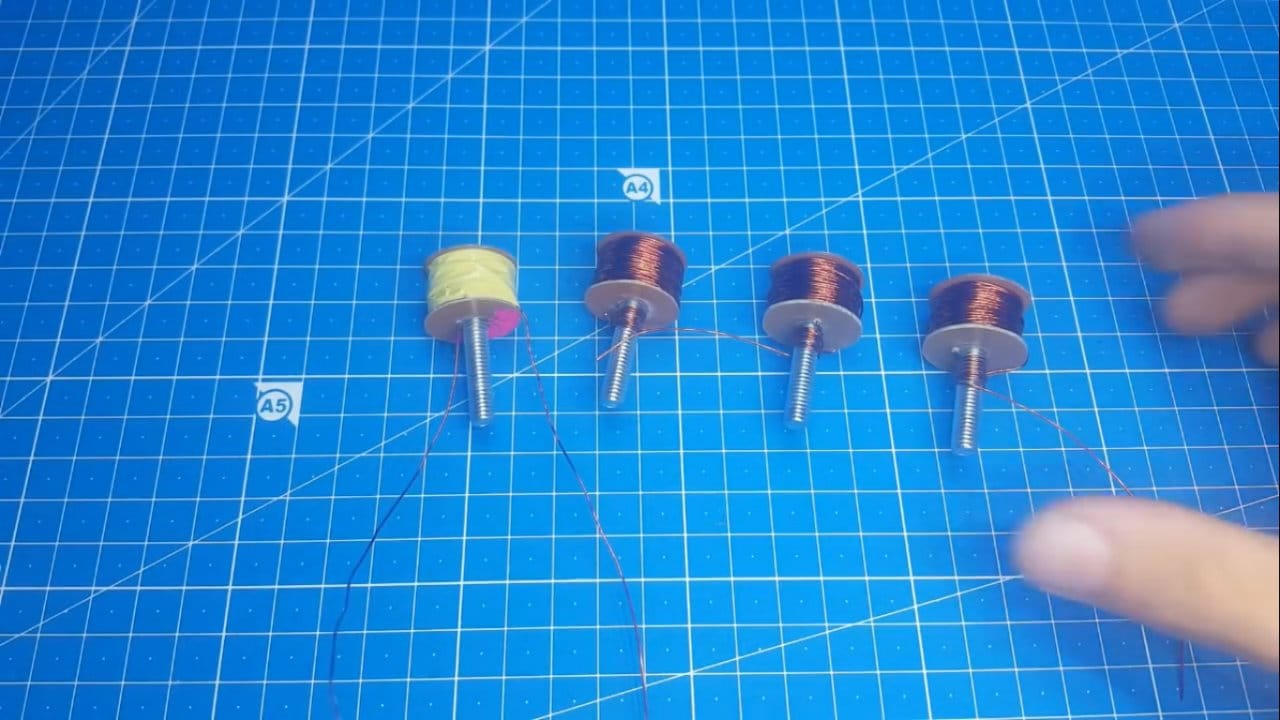
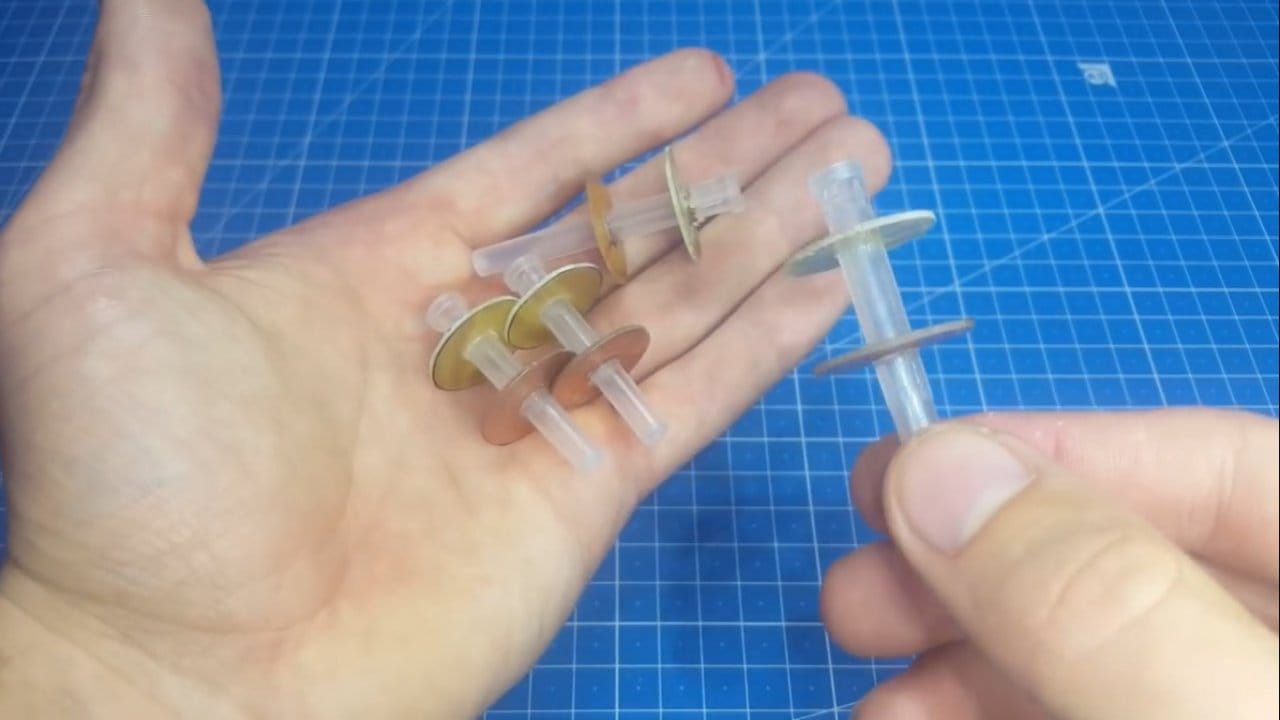
После подготовки макетки займемся намоткой катушек. Как уже говорилось ранее, именно в катушках и была проблема, так как все они были с металлическим сердечником. В качестве основания возьмем колпачок для иголки шприца. Сами ограничители для катушек сделаны, как и в первых вариантах, из текстолита.
Размер катушек перед вами.
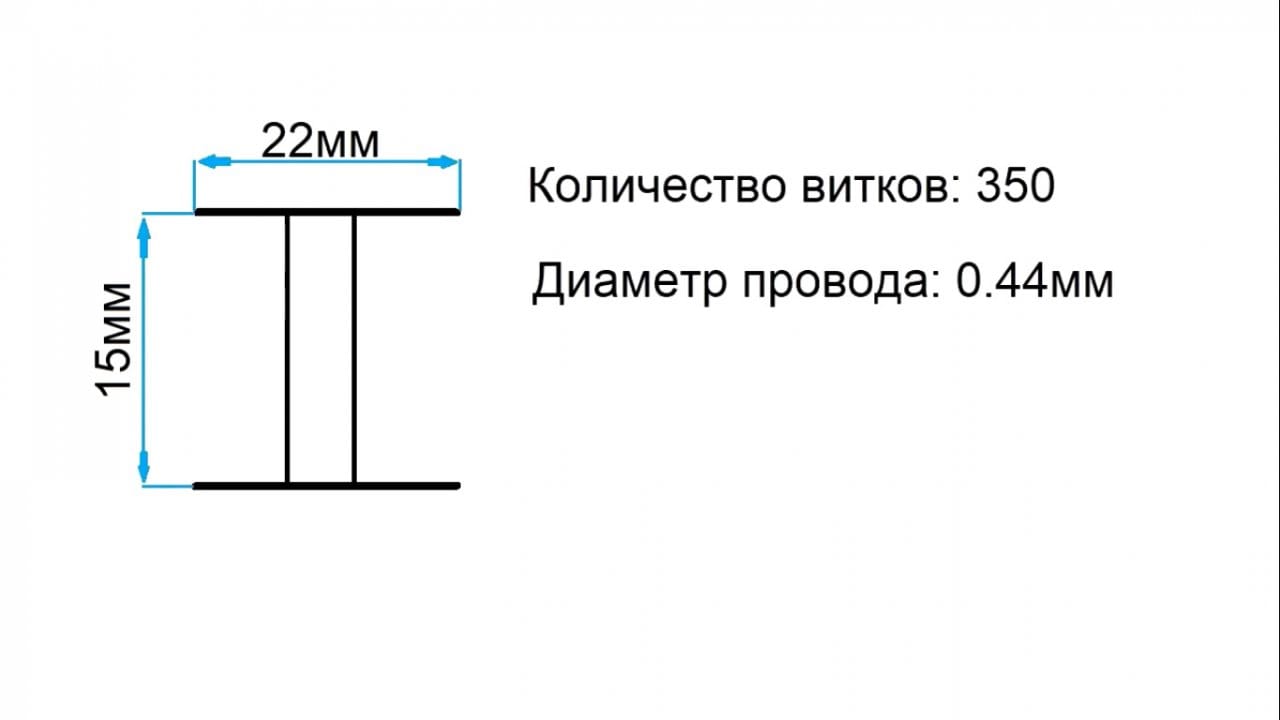
Все они мотаются в одну сторону. Количество витков 350, диаметр провода 0.44 мм. Думаю, если вносить 10, а то и 20 процентные изменение в параметры обмоток, результат не изменится.
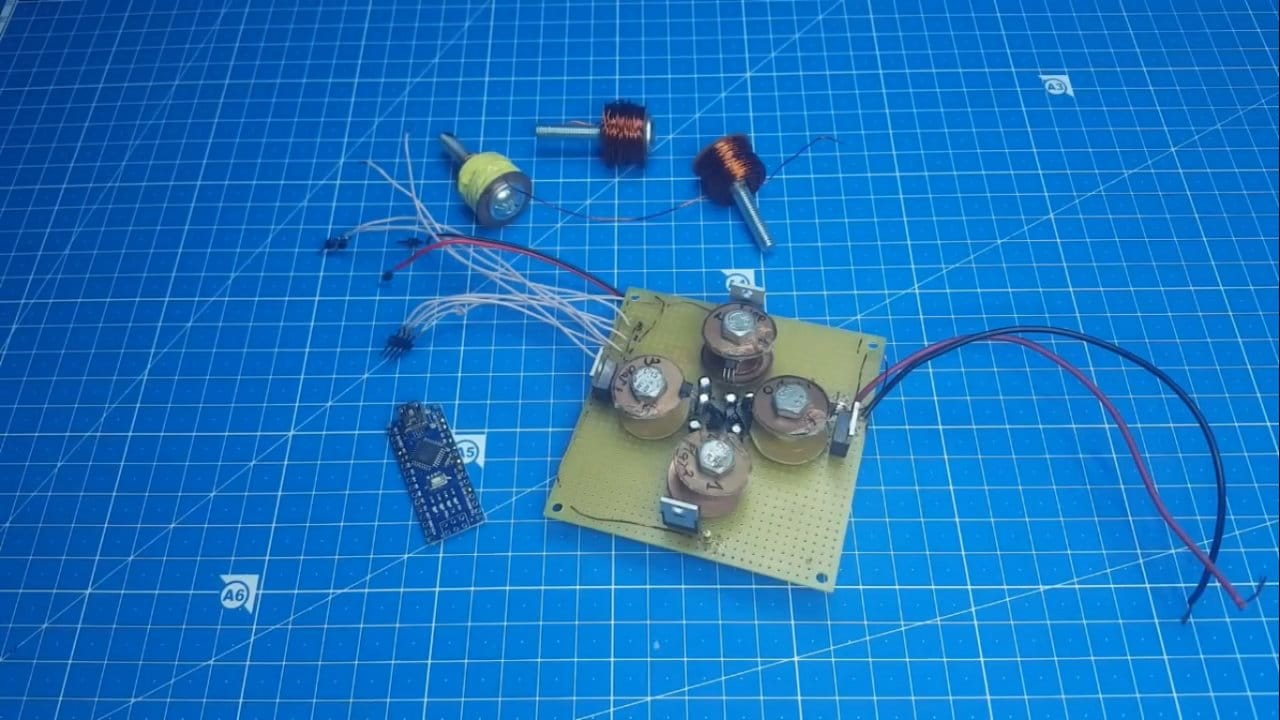
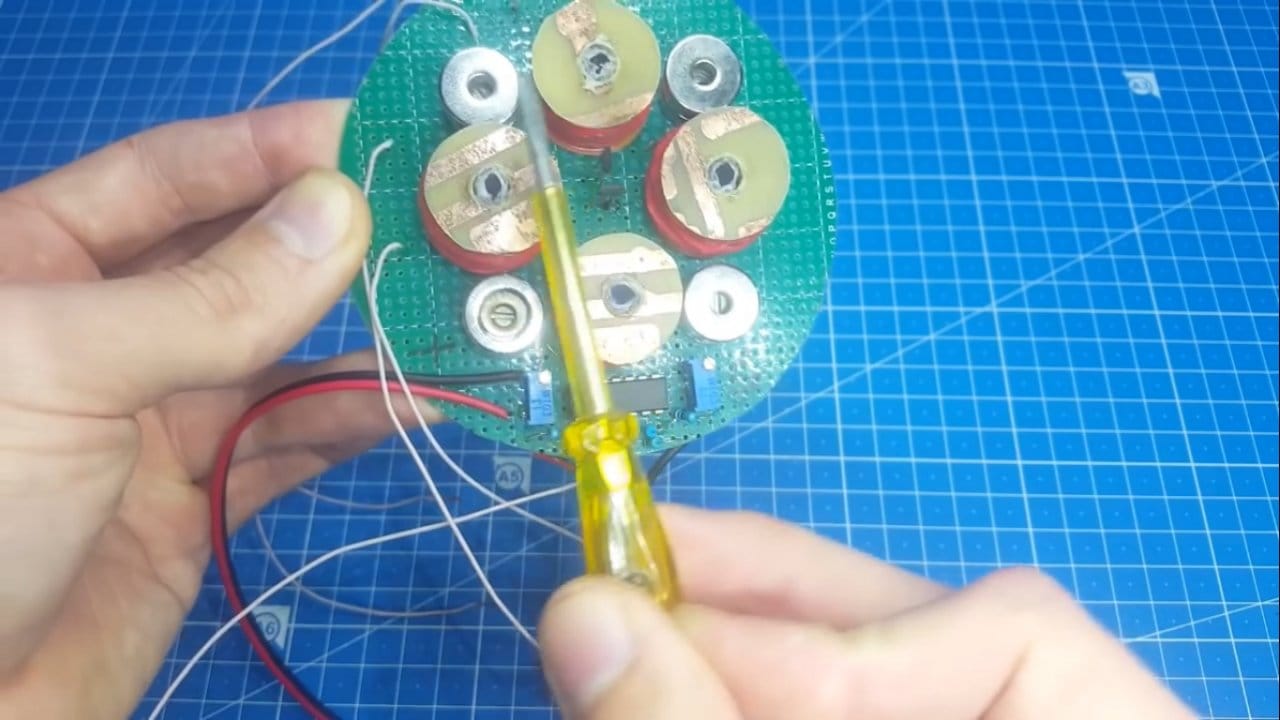
Когда катушки готовы, устанавливаем их на плату, как и остальные части. Теперь необходимо соединить катушки по 2 штуки последовательно, таким образом, чтобы при подаче напряжения на пару катушек, одна из них притягивала, а вторая в этот момент отталкивала.
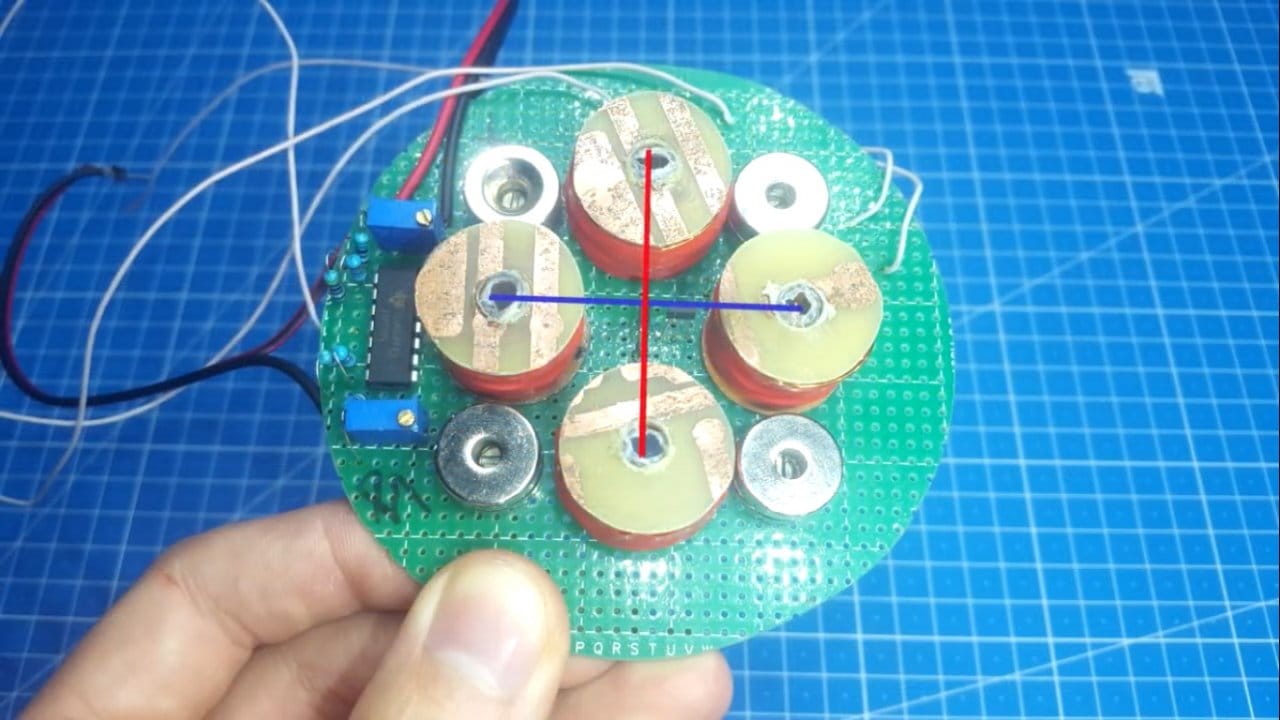
По поводу расположение датчиков Холла. Они должны быть строго на оси своих катушек. То куда они развернуты роли не играет, все будет корректироваться в настройке.
Следующий шаг - соединение всех элементов в одну цепь и прошивка Ардуино. Сам скетч и все картинки со схемами найдете в архиве проекта.

А вот после прошивки начинаются сложности. Для настройки постоянные магниты в основание ставить нельзя. Когда залили скетч в Ардуино, берем магнит, который должен левитировать и располагаем над катушками, водя рукой над тем местом где должна быть точка левитации, мы должны почувствовать сопротивление катушек.

Вот допустим, мы ведем влево, значит катушки срабатывают и тянут вправо, если тяга идет не в ту сторону, то нужно поменять местами выводы катушек на драйвере.
Теперь настало время установить магниты на плату. Магниты должны быть неодимовыми.


Вообще можно использовать и прямоугольные магниты в основании, но автор решил взять круглые, так как они дешевле и имеют отверстие для крепления. Магниты устанавливаем в пространства между катушками. Расстояние между ними по диагонали равно 5,5 см.

Теперь берем магнит, который будем подвешивать и пытаемся его расположить в центре левитации. Тут важно угадать с весом магнита. Автор делал так, брал основной магнит и на него вешал мелкие, таким образом нашел равновесие. Но магнит в центре висел не долго, его постоянно сносило в одну сторону. Тут на помощь к нам приходят подстроечные резисторы, вращая их можно смещать точку равновесия. Таким образом мы выравниваем парящий магнит.

Все, настройка завершена. Осталось все это красиво оформить в корпус. Для этого подойдет вот такой короб.
Но, как оказалось, у него очень толстые стенки, а у нас каждый миллиметр буквально на вес золота. Поэтому необходимо вырезать в крышке отверстие под катушки, и закрепить их заподлицо с корпусом.
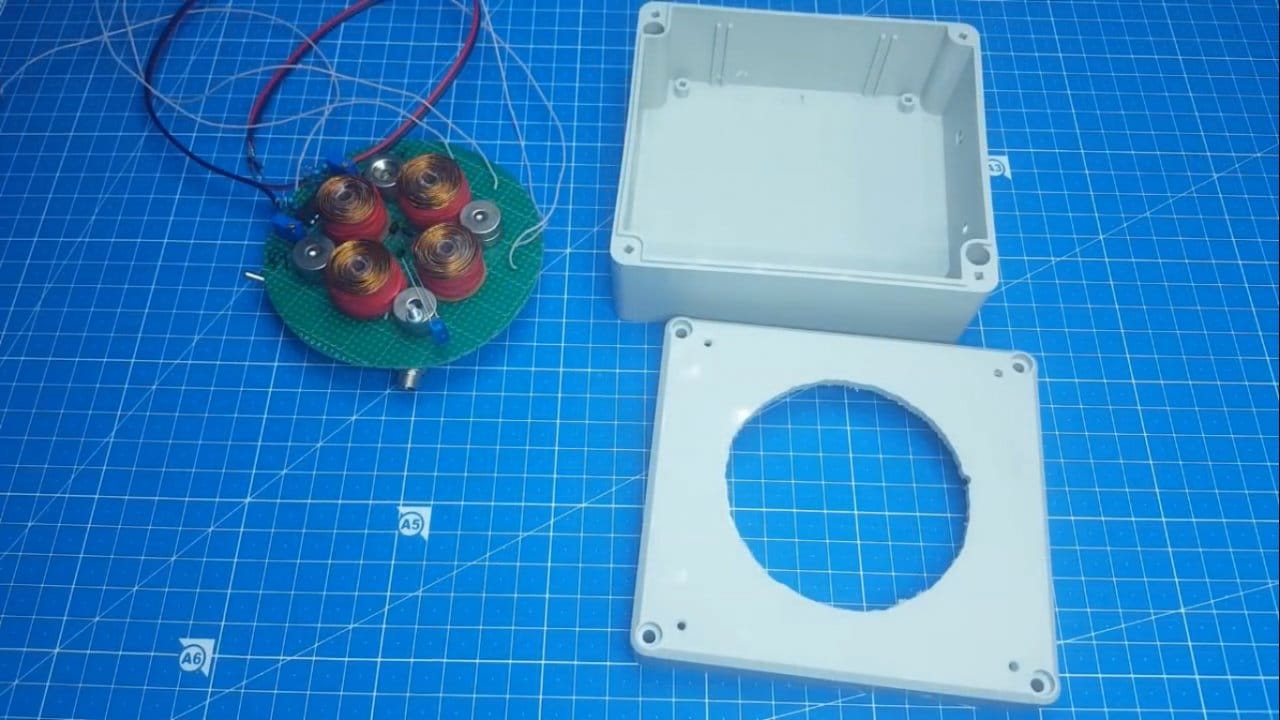
Получившееся отверстие в корпусе нужно было чем-то накрыть. И тут отлично подошла еще одна макетная плата, получилось ну очень даже здорово.
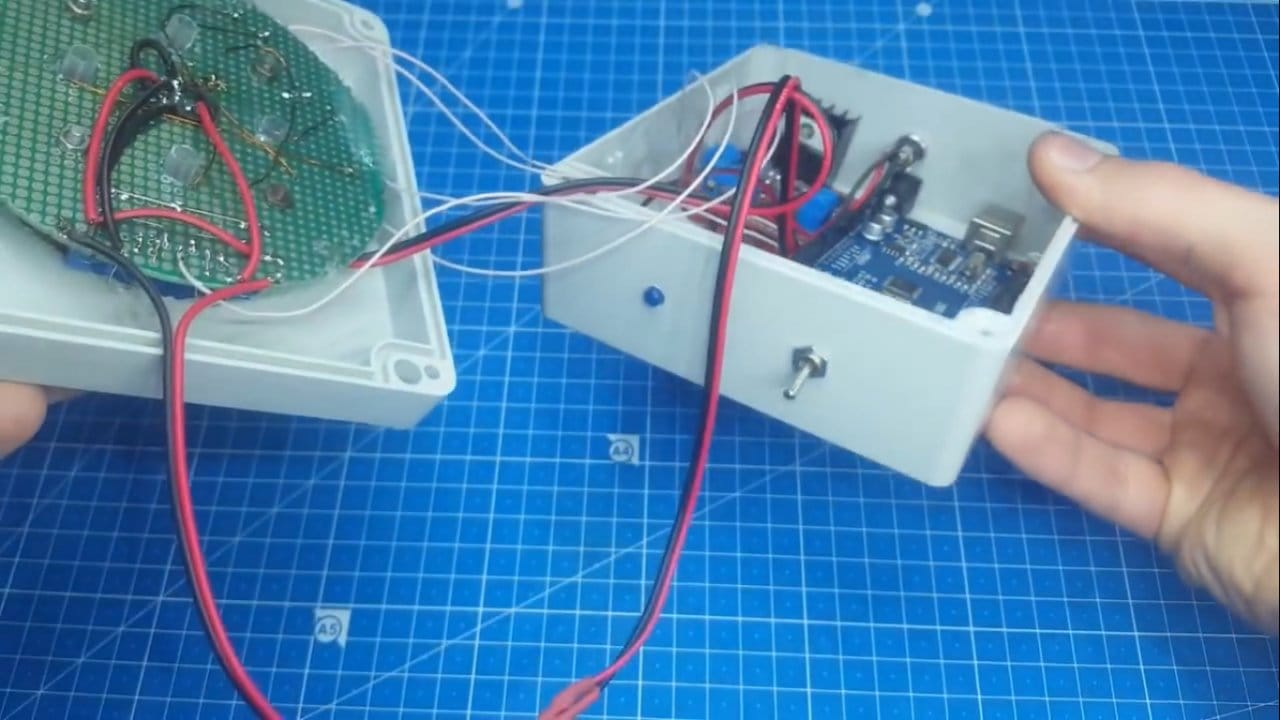

В корпусе расположили драйвер и Ардуинку, а питание возьмем от внешнего адаптера на 12В, 2А. В итоге конструкция стала похожа на заводскую модель. На нее можно установить какую-нибудь декоративную штуку типа самолетика или машинки, и наслаждаться.

На этом все. Благодарю за внимание. До новых встреч!
Видео:
Свежие комментарии